Here are some highlighted ones that I take charges most of the work in both researching and developing.
Samsung Multimedia
Jan, 2023 - Present Active
Private Project
Goal:
The project aimed to provide overall AI-featured functions for Samsung multimedia applications.
Some commercialized functions are: Inpainting, Outpainting for an image through Generative Stable Diffusion;
Image filter extraction; Tone adaptation; Object visual searching; etc.
Detail information is hidden due to the company policies
Samsung Multimedia
Jan, 2023 - Present Active
Private Project
Goal:
The project aimed to provide overall AI-featured functions for Samsung multimedia applications.
Some commercialized functions are: Inpainting, Outpainting for an image through Generative Stable Diffusion;
Image filter extraction; Tone adaptation; Object visual searching; etc.
Detail information is hidden due to the company policies
Goal:
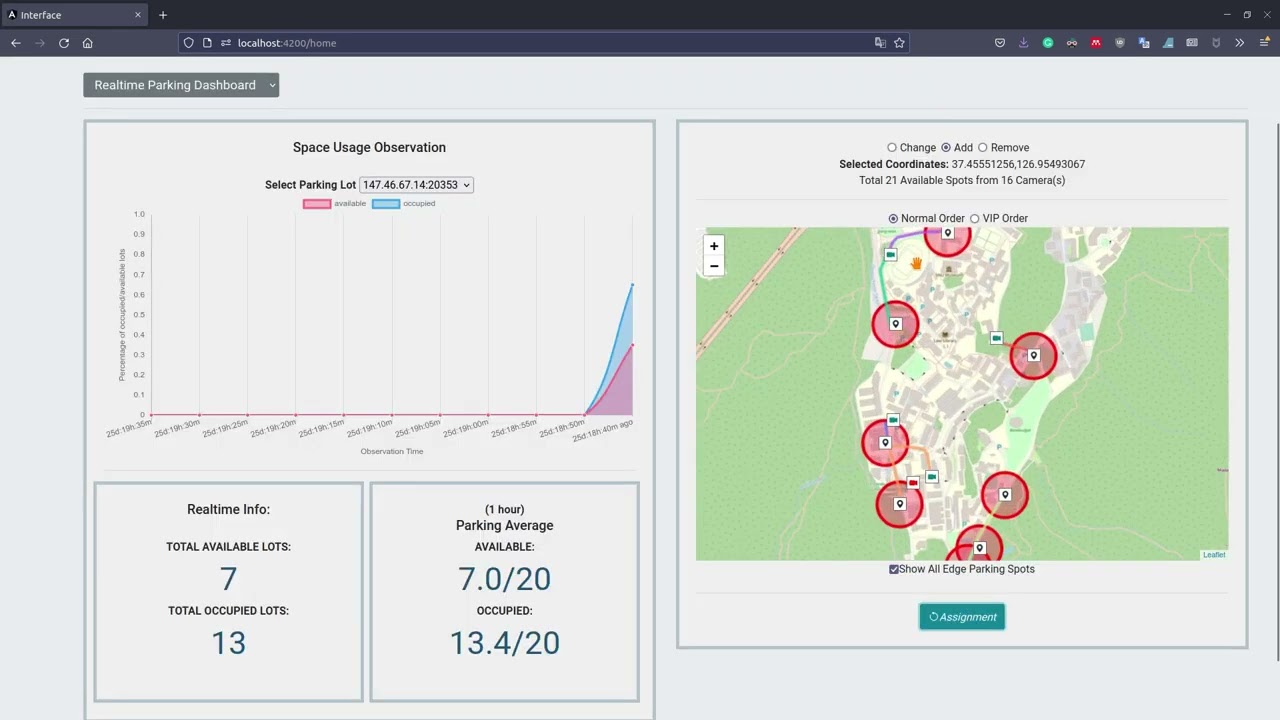
The project aimed to reduce the effort of control and manage parking spots in multiple parking lots by using computer vision approaches. At the same time, the objective should also provide handy functions to the drivers to choose optimal parking places in term of environment and expense factors.
Features
A public website for users to query vacant spots in various parking space at once
A semi auto-assignment function to help users find their optimal spots
A real-time occupancy detection based on image captures
Description
Each edge will handle captures from multiple cameras and provide reliable occupancy detection with high precision quality. The occpancy information is concatenated for a specific parking rate in each parking lot and then stored in a shared database to avoid duplicate information. From the concrete measurements, each parking assignment request can be provided through a query.
Demonstration
This is a partial demonstation of our project. The demo is conducted in Seoul National University campus. Further benchmark can be found in our paper
Goal:
The project aimed to reduce the effort of control and manage parking spots in multiple parking lots by using computer vision approaches. At the same time, the objective should also provide handy functions to the drivers to choose optimal parking places in term of environment and expense factors.
Features
A public website for users to query vacant spots in various parking space at once
A semi auto-assignment function to help users find their optimal spots
A real-time occupancy detection based on image captures
Description
Each edge will handle captures from multiple cameras and provide reliable occupancy detection with high precision quality. The occpancy information is concatenated for a specific parking rate in each parking lot and then stored in a shared database to avoid duplicate information. From the concrete measurements, each parking assignment request can be provided through a query.
Demonstration
This is a partial demonstation of our project. The demo is conducted in Seoul National University campus. Further benchmark can be found in our paper
Illegal Driving Detection
Feb, 2022 - Jun, 2022Finish
Outsource Project
Goal: The project aimed to support capturing illegal driving behviours (speeding/wrong direction/etc).
Features
Providing vehicle detection and tracking
Return and mark illegal behaviours in real-time
Description
Even with CCTV support, officers are still struggling to capture every illegal driving behaviours.
This project is created to catch the illegal driving behviours in real-time manner with high accuracy.
For a vehicle entering a road, we assume the vehicle will not be occuled during the drive, we can track it efficently through time.
By predefinding camera calibration information and legal vector direction, we can successfully capture the speed of a vehicle and its direction during its appearance under CCTV.
Demonstration
This is a demonstration of the restricted turning-back case and the opposite driving on Vietnamese highways.
The videos are public sources from Vietnamese news
Illegal Driving Detection
Feb, 2022 - Jun, 2022Finish
Outsource Project
Goal: The project aimed to support capturing illegal driving behviours (speeding/wrong direction/etc).
Features
Providing vehicle detection and tracking
Return and mark illegal behaviours in real-time
Description
Even with CCTV support, officers are still struggling to capture every illegal driving behaviours.
This project is created to catch the illegal driving behviours in real-time manner with high accuracy.
For a vehicle entering a road, we assume the vehicle will not be occuled during the drive, we can track it efficently through time.
By predefinding camera calibration information and legal vector direction, we can successfully capture the speed of a vehicle and its direction during its appearance under CCTV.
Demonstration
This is a demonstration of the restricted turning-back case and the opposite driving on Vietnamese highways.
The videos are public sources from Vietnamese news
Goal:
The project aimed to help elders,handicapped/injured people and children to get their seat during public transportation.
Furthermore, it also provides the number of passengers on a specific route for estimating the optimized quantity of transportation and alerting passengers of incoming transports.
Features
A public website for users to query each incoming vacant seats and capacities of each bus/train/subway
An vibrate sensor at each seat alert long-time seating person(s) in silent to leave their seats for the priotized candidates
Secure information at the edge level
Description
Each edge will handle a specific task and combine information for the seat allocation priotization.
Camera information from each edge camera will be in charged of collecting information of entered passengers and their attributes and encrypted them at feature level for tracking and seat duration measurement.
Some edge computation device will be specially assigned for checking the occupancy of a seat and control sensors under their perspective views. Information of others camera will be aggragated here for concurrent update and decision.
Then, this information will be publish to a broker for information sharing and project application
Demonstration
This is a partial demonstation of our project. The demo is conducted in PIDLab environment.
We associate the detection with the top-view for handling crowded environment and the front face attribute at the entrance of the door.
These information is quickly delivered to another edge, in charge of seat management
The edge used in this project is sponsored by Google and Nvidia
Goal:
The project aimed to help elders,handicapped/injured people and children to get their seat during public transportation.
Furthermore, it also provides the number of passengers on a specific route for estimating the optimized quantity of transportation and alerting passengers of incoming transports.
Features
A public website for users to query each incoming vacant seats and capacities of each bus/train/subway
An vibrate sensor at each seat alert long-time seating person(s) in silent to leave their seats for the priotized candidates
Secure information at the edge level
Description
Each edge will handle a specific task and combine information for the seat allocation priotization.
Camera information from each edge camera will be in charged of collecting information of entered passengers and their attributes and encrypted them at feature level for tracking and seat duration measurement.
Some edge computation device will be specially assigned for checking the occupancy of a seat and control sensors under their perspective views. Information of others camera will be aggragated here for concurrent update and decision.
Then, this information will be publish to a broker for information sharing and project application
Demonstration
This is a partial demonstation of our project. The demo is conducted in PIDLab environment.
We associate the detection with the top-view for handling crowded environment and the front face attribute at the entrance of the door.
These information is quickly delivered to another edge, in charge of seat management
The edge used in this project is sponsored by Google and Nvidia
Goal:
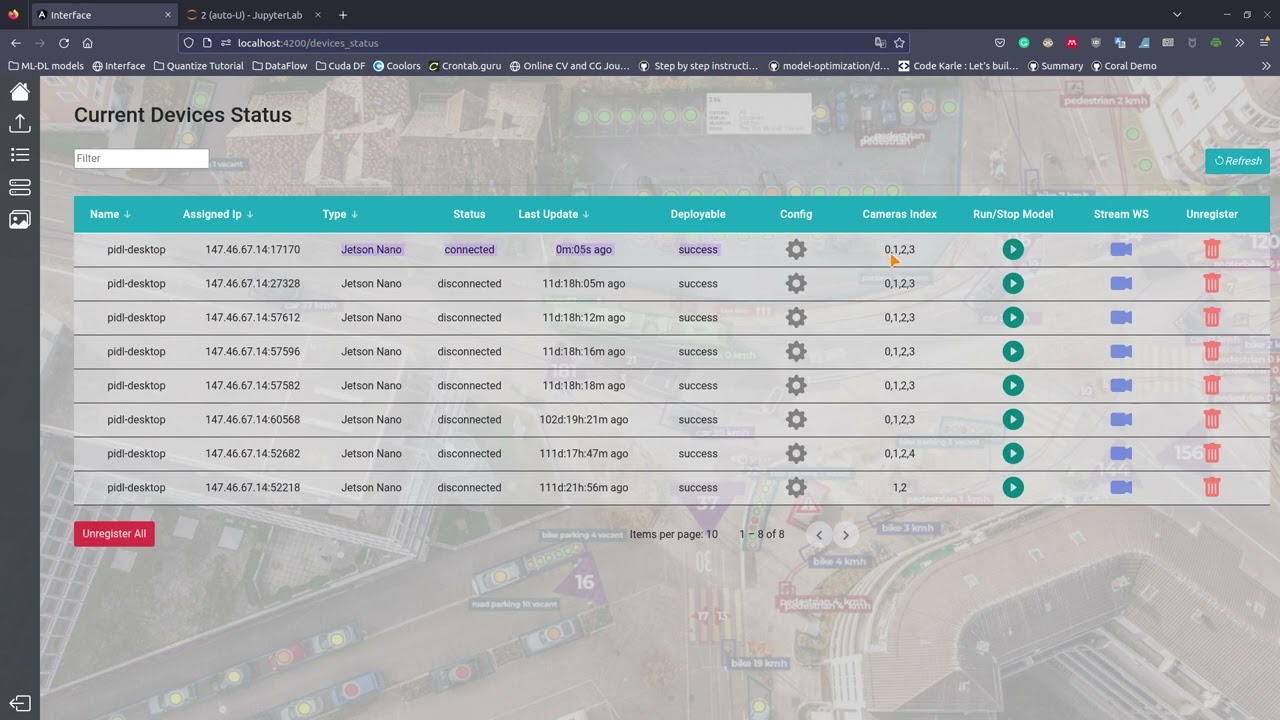
The project aimed to provide a framework for serving a data life cycle scope through Nvidia Jetson and Google Models with two main functions: auto-aware of incorrect processed information, edge level cleansing data for model training, auto-match compression configuration and remote model inference customization.
Features
A website manages and versions models. Models can be then quantized for a specific configuration (ranging from 8bits to FP32) and provided perfromance awareness remotely
Edge models can launched, paused and stopped remotely through broker messages
An edge model can self-cleanse data and only send back valuable/questionable data for model training
Allow users to custom inference codes remotely on edge devices and provide a compact library in Python
Description
A post training model can be uploaded to the website for versioning. From the website, users can self write inference codes based on the corresponding library and deploy the model to the edges. Based on what edge configuration, the model will be quantized and attached data knowledge to avoid performance failure in the realworld environment. The model is then sent to edge and control remotely through the websocket. On the edge level, the model will provide task specific with a minimal delay in execution. During each inference, the edge model will continuously provide estimation on the errorness of data inference and collect high questionable results for labeling and avoiding data storage overhead.
Demonstration
This is the full pipeline of the framework for the Smart Parking Project
The edge used in this project is sponsored by Google and Nvidia
Goal:
The project aimed to provide a framework for serving a data life cycle scope through Nvidia Jetson and Google Models with two main functions: auto-aware of incorrect processed information, edge level cleansing data for model training, auto-match compression configuration and remote model inference customization.
Features
A website manages and versions models. Models can be then quantized for a specific configuration (ranging from 8bits to FP32) and provided perfromance awareness remotely
Edge models can launched, paused and stopped remotely through broker messages
An edge model can self-cleanse data and only send back valuable/questionable data for model training
Allow users to custom inference codes remotely on edge devices and provide a compact library in Python
Description
A post training model can be uploaded to the website for versioning. From the website, users can self write inference codes based on the corresponding library and deploy the model to the edges. Based on what edge configuration, the model will be quantized and attached data knowledge to avoid performance failure in the realworld environment. The model is then sent to edge and control remotely through the websocket. On the edge level, the model will provide task specific with a minimal delay in execution. During each inference, the edge model will continuously provide estimation on the errorness of data inference and collect high questionable results for labeling and avoiding data storage overhead.
Demonstration
This is the full pipeline of the framework for the Smart Parking Project
The edge used in this project is sponsored by Google and Nvidia
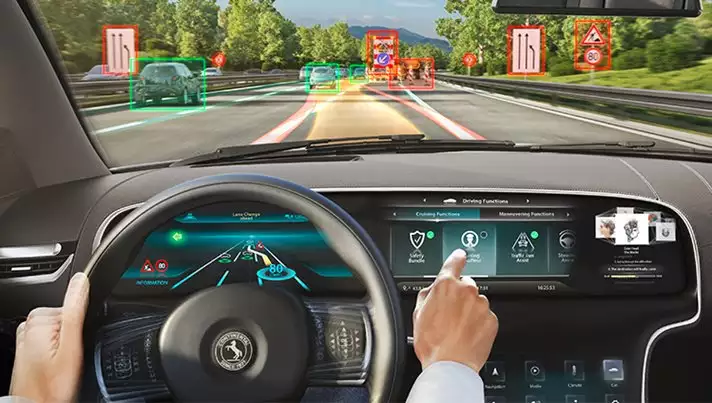
Goal: The project aimed to support drivers with surrounding environments during their drive by a distributed intelligent edge device.
Features
Providing surround object distances and their relative velocity
Counting the number of vehicle during the drive and integrate with public traffic history for a personalized route recommender system
Secure information at the edge level
Description
Drivers, especially taxi drivers, will be handed an edge device controlling their vehicle surrounding cameras. The multi-cameras will capture the object in various views and angles and
formulate their information into traffic participants candidate. During the drive, objects such as pedestrians, cars, trucks,... will be recorded and stored at encrypted feature level on the edge.
from that capture, an distance estimation will be provided to alert drivers about surrounding vehicles velocity. Close contacted and high speed vehicle will be informed to avoid accidents from multiple views.
This helps enable better awareness for the driver.
After a day, the number of each category object from each drive will be uploaded to the cloud for a route recommender system
Demonstration
This is a partial demonstation of our project. The demo is conducted in Seoul city streets on one single Coralboard.
The edge used in this project is sponsored by Google and Nvidia
Goal: The project aimed to support drivers with surrounding environments during their drive by a distributed intelligent edge device.
Features
Providing surround object distances and their relative velocity
Counting the number of vehicle during the drive and integrate with public traffic history for a personalized route recommender system
Secure information at the edge level
Description
Drivers, especially taxi drivers, will be handed an edge device controlling their vehicle surrounding cameras. The multi-cameras will capture the object in various views and angles and
formulate their information into traffic participants candidate. During the drive, objects such as pedestrians, cars, trucks,... will be recorded and stored at encrypted feature level on the edge.
from that capture, an distance estimation will be provided to alert drivers about surrounding vehicles velocity. Close contacted and high speed vehicle will be informed to avoid accidents from multiple views.
This helps enable better awareness for the driver.
After a day, the number of each category object from each drive will be uploaded to the cloud for a route recommender system
Demonstration
This is a partial demonstation of our project. The demo is conducted in Seoul city streets on one single Coralboard.
The edge used in this project is sponsored by Google and Nvidia
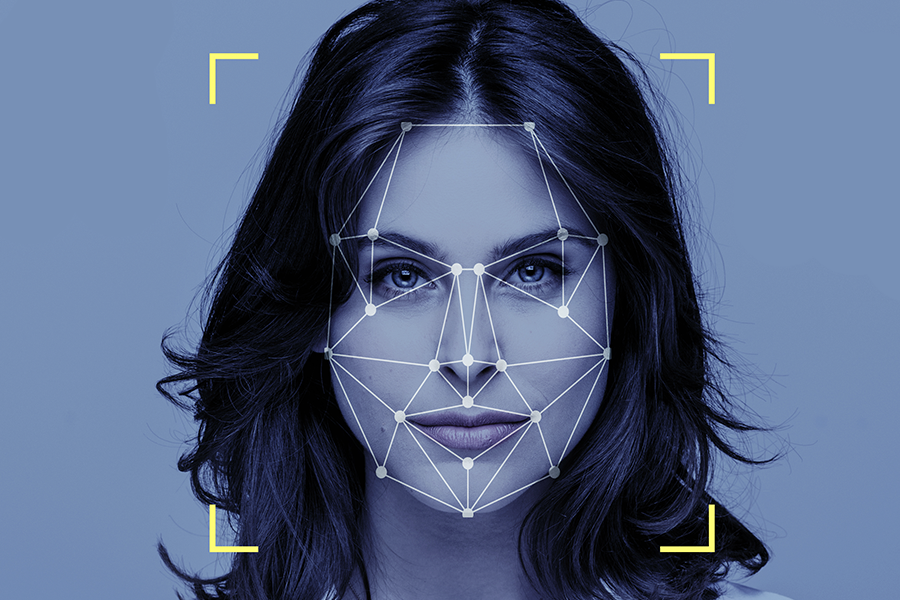
Front Face Analysis
Jul, 2020 - Sep, 2020Finish
Private Project
Goal:
The project aimed to provide analysis on a front face capture image for beauty shops.
From a front face, skin status information, emotional status and age information will be given.
Based on this information, beauty shop managers can understand better on the customer categories and their satisfaction.
Furthermore, it also plays an important role in product recommdation system
Detail information is hidden due to the company policies
Front Face Analysis
Jul, 2020 - Sep, 2020Finish
Private Project
Goal:
The project aimed to provide analysis on a front face capture image for beauty shops.
From a front face, skin status information, emotional status and age information will be given.
Based on this information, beauty shop managers can understand better on the customer categories and their satisfaction.
Furthermore, it also plays an important role in product recommdation system
Detail information is hidden due to the company policies
Capture Small Identity
Dec, 2019 - Feb, 2020Finish
Outsource Project
Goal: The project aimed to capture identities of human in the scence for human verification tasks
Solutions
Capture small face efficiently for 4K resolution patched faces
Localize small human for PTZ camera zoom in and face capture
Demonstration
This is a small face detection demonstation. The identity for reidentification is not covered inside this demo. The faces after having been located will be patched out from the initial 4K frame input.
Capture Small Identity
Dec, 2019 - Feb, 2020Finish
Outsource Project
Goal: The project aimed to capture identities of human in the scence for human verification tasks
Solutions
Capture small face efficiently for 4K resolution patched faces
Localize small human for PTZ camera zoom in and face capture
Demonstration
This is a small face detection demonstation. The identity for reidentification is not covered inside this demo. The faces after having been located will be patched out from the initial 4K frame input.